
一、安川机器人机械安全端子台基板(JANCD-YFC22-E)
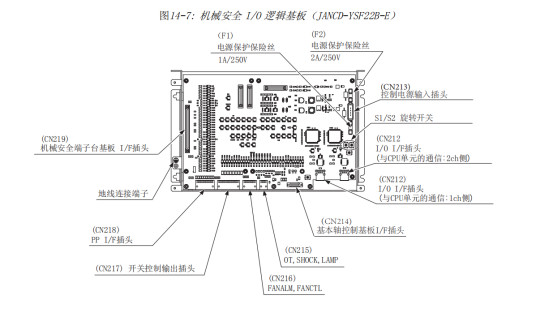
1、机械安全 I/O 基板(JANCD-YSF22B-E)
2、安全端子台基板接线外引
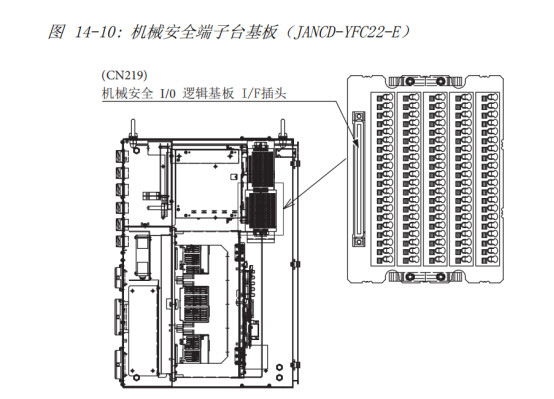
(1)机械安全端子台基板(JANCD-YFC22-E)是为了连接安全输出输入信号等专用外部信号的端子台基板。
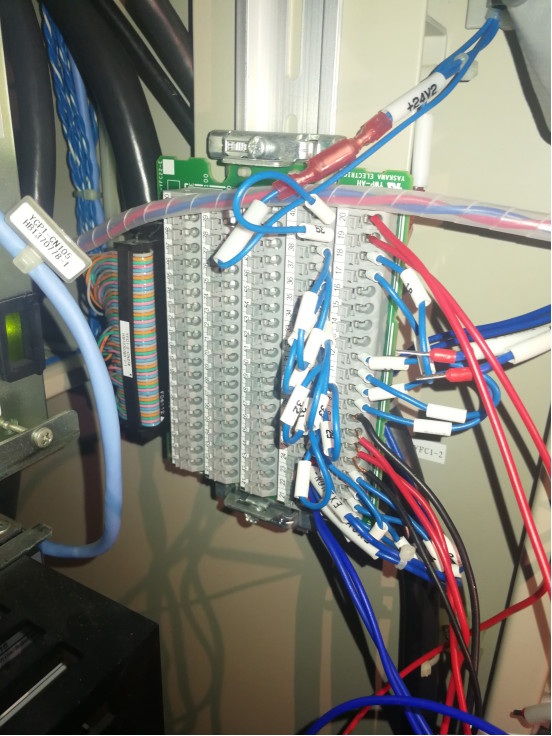
(2)安全端子基台实物图片
3、安全段子台基板100个端口作用 JANCD-YFC22-E 连接端子表
|
信号 名称 |
连接编号 |
双路输入内容 |
出厂设定 |
|
SAFF1+ SAFF1- |
1 |
安全插销:如果打开安全栏的门,用此信号切断伺服电源。连接安全栏门上的安全插销的联锁信号。如输入此联锁信号,则切断伺服电源。当此信号接通时,伺服电源不能被接通。注意这些信号在示教模式下无效。 |
用跳线短接 |
|
2 |
|||
|
SAFF2+ SAFF2- |
3 |
||
|
4 |
|||
|
EXESP1+ EXESP1- EXESP2+ EXESP2- |
5 |
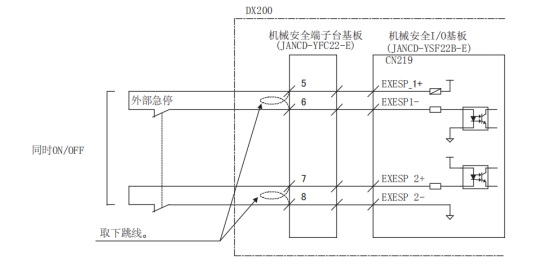
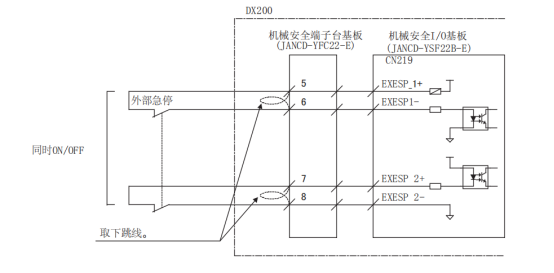
外部急停:用来连接一个外部操作设备的外部急停开关。入此联锁信号,则切断伺服电源。当此信号接通时,伺服电源不能被接通。注意这些信号在示教模式下无效。
|
用跳线短接 |
|
6 |
|||
|
7 |
|||
|
8 |
|||
|
EXDSW1+ EXDSW1- EXDSW2+ EXDSW2- |
9 |
外部安全开关:当两人进行示教时,为没有拿示教编程器的人连接一个安全开关。
|
用跳线短接
|
|
10 |
|||
|
11 |
|||
|
12 |
|||
|
FST1+ FST1- FST2+ FST2- |
13 |
维护输入:在示教模式时的测试运行下,解除低速极限。短路输入时,测试运行的速度是示教时的100%速度。输入打开时,在SSP输入信号的状态下,选择第1 低速(16%)或者选择第2 低速(2%)。 |
开路 |
|
14 |
|||
|
15 |
|||
|
16 |
|||
|
SSP+ SSP- |
17 |
选择低速模式:在这个输入状态下,决定了 FST (全速测试)打开时的测试运行速度。 打开时:第 2低速 (2%) 短路时:第 1低速 (16%) |
|
|
18 |
|||
|
EXHOLD+ EXHOLD- |
19 |
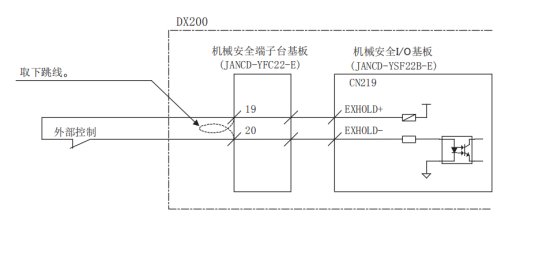
外部暂停:用来连接一个外部操作设备的暂停开关。如果输入此信号,则程序停止执行。当输入该信号时,不能进行启动和轴操作 |
用跳线短接 |
|
20 |
|||
|
EXSVON+ EXSVON- |
21 |
外部伺服 ON :连接外部操作机器等的伺服 ON开关时使用。通信时,伺服电源打开。 |
用跳线短接 |
|
22 |
|||
|
SYSRUN+ SYSRUN- |
23 |
SYSRUN 信号:根据SYSRUN信号判断DX200控制柜的正常/异常状态时使用 |
开路 |
|
24 |
|||
|
ONEN11+ ONEN11- ONEN12+ ONEN12- |
25 |
伺服接通启用:在机器人系统分为多个伺服区域时,单独开启/关闭各区域的伺服电源的功能。使用此信号连接。
|
跳线短接 |
|
26 |
|||
|
27 |
|||
|
28 |
|||
|
ONEN21+ ONEN21- ONEN22+ ONEN22- |
29 |
||
|
30 |
|||
|
31 |
|||
|
32 |
|||
|
ONEN31+ ONEN31- ONEN32+ ONEN32- |
33 |
||
|
34 |
|||
|
35 |
|||
|
36 |
|||
|
ONEN41+ ONEN41- ONEN42+ ONEN42- |
37 |
||
|
38 |
|||
|
39 |
|||
|
40 |
|||
|
OT21+ OT21- OT22+ OT22- |
41 |
外部轴超程 :外部轴等机器人本体以外部分要防超程使用。 |
开路 |
|
42 |
|||
|
43 |
|||
|
44 |
|||
|
OT31+ OT31- OT32+ OT32- |
45 |
||
|
46 |
|||
|
47 |
|||
|
48 |
|||
|
OT41+ OT41- OT42+ OT42- |
49 |
||
|
50 |
|||
|
51 |
|||
|
52 |
|||
|
PPESP3+ PPESP3- PPESP4+ PPESP4- |
53 |
急停按钮接点输出:示教编程器急停按钮的触点输出时使用。 |
开路 |
|
54 |
|||
|
55 |
|||
|
56 |
|||
|
PBESP3+ PBESP3- PBESP4+ PBESP4- |
57 |
在输出DX200控制柜门前的急停按钮触点时使用。 |
开路 |
|
58 |
|||
|
59 |
|||
|
60 |
|||
|
GSIN11+ GSIN11- GSIN12+ GSIN12- |
61 |
通用安全输入 :通用安全输入信号用于安全逻辑回路功能。 |
打开 |
|
62 |
|||
|
63 |
|||
|
64 |
|||
|
GSIN21+ GSIN21- GSIN22+ GSIN22- |
65 |
||
|
66 |
|||
|
67 |
|||
|
68 |
|||
|
GSOUT11+ GSOUT11- GSOUT12+ GSOUT12- |
69 |
通用安全输出:通用安全输出信号用于安全逻辑回路功能。 |
打开 |
|
70 |
|||
|
71 |
|||
|
72 |
|||
|
GSOUT21+ GSOUT21- GSOUT22+ GSOUT22- |
73 |
||
|
74 |
|||
|
75 |
|||
|
76 |
|||
|
GSEDM1+ GSEDM1- |
77 |
||
|
78 |
|||
|
GSEDM2+ GSEDM2- |
79 |
||
|
80 |
|||
|
+24V2U3 |
81 |
DC+24V2 输出端子 |
打开 |
|
82 |
|||
|
92 |
|||
|
93 |
|||
|
024V2 |
83 |
DC+24V2 输出端子 |
打开 |
|
84 |
|||
|
94 |
|||
|
95 |
|||
|
AXDIN_COM AXDIN1 AXDIN2 AXDIN3 AXDIN4 AXDIN5 AXDIN6 |
85 |
直接输入(伺服):输入搜索功能等快速响应信号时使用。
|
打开 |
|
86 |
|||
|
87 |
|||
|
88 |
|||
|
89 |
|||
|
90 |
|||
|
91 |
|||
|
AIN_COM AXIN1 AXIN2 |
96 |
通用输入(伺服) :输入搜索功能等快速响应信号时使用。 |
打开 |
|
97 |
|||
|
98 |
|||
|
AXOUT1 AXOUT2 |
99 |
通用输出(伺服):向外部输入信号时使用。 |
打开 |
|
100 |
二、安川机器人通用 I/O 基板(JANCD-YIO21-E)
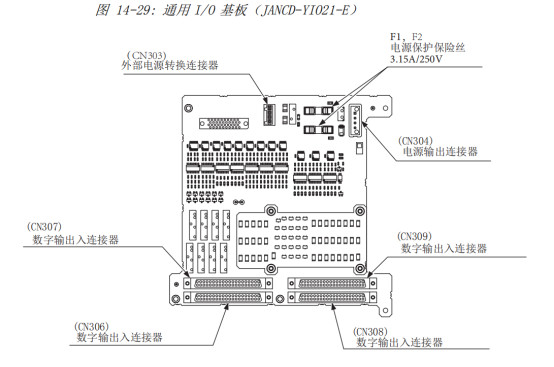
(2)外接实物图

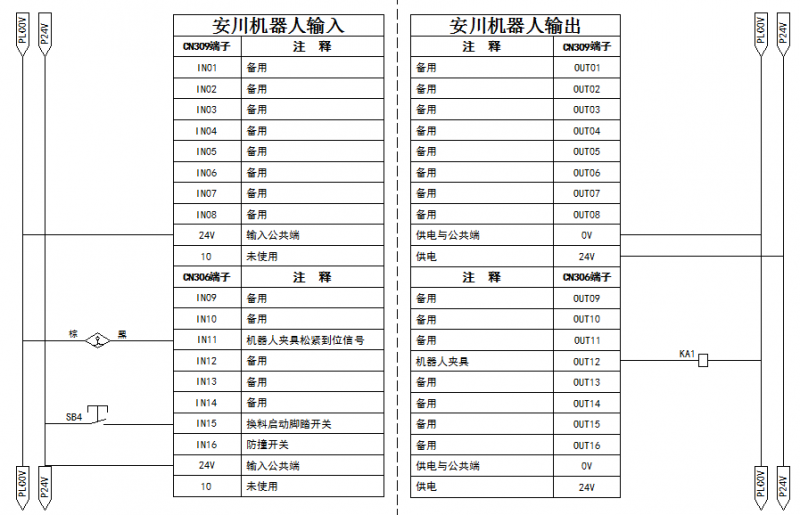
(3)机器人通用输出入连接器(CN306、307、308、309)
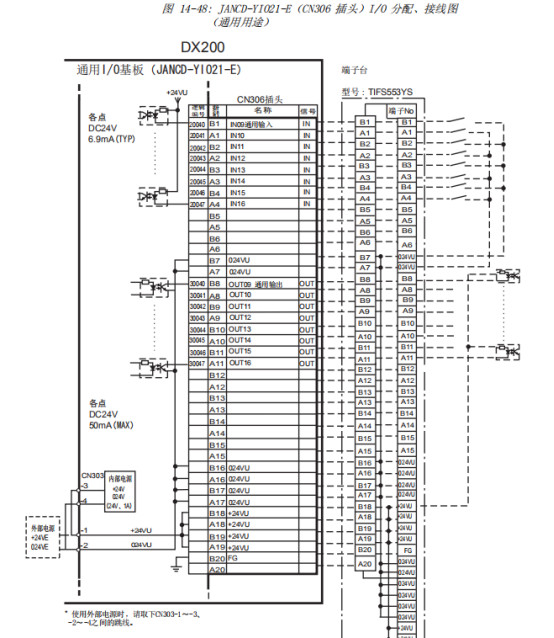
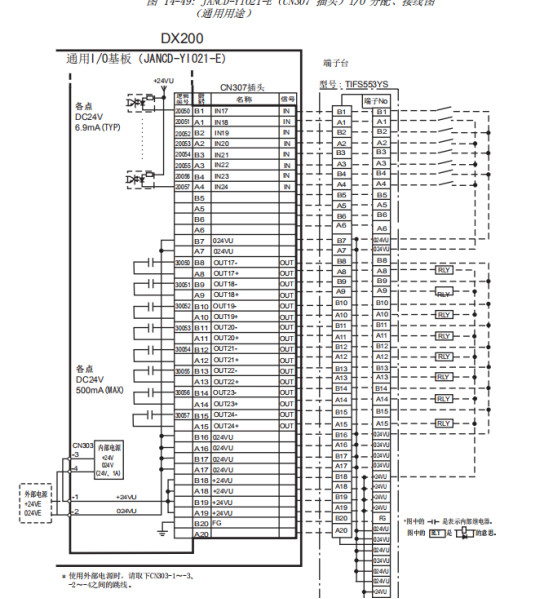
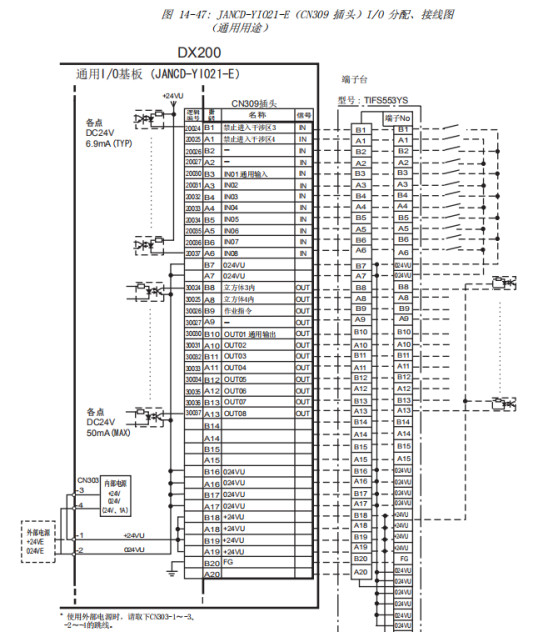
机器人通用输出入连接器(CN306、307、308、309)的连接制作连接在通用 I/O 基板(JANCD-YIO21-E)的输出入插头(CN306、307、308、 309)的电线时,请参考下图。电线请使用无屏蔽的双绞线。(电线一侧的插头及I/O端子台为选装件)
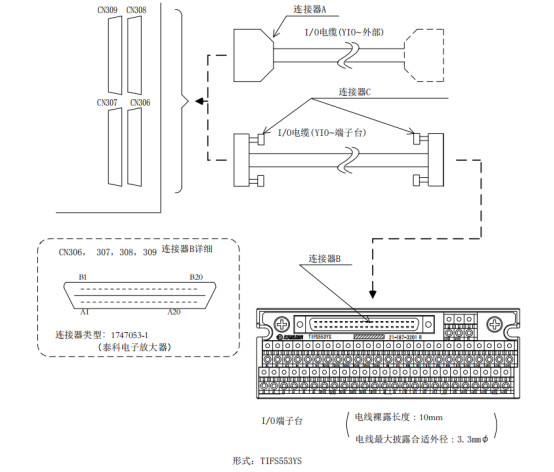
(4)连接器端子头

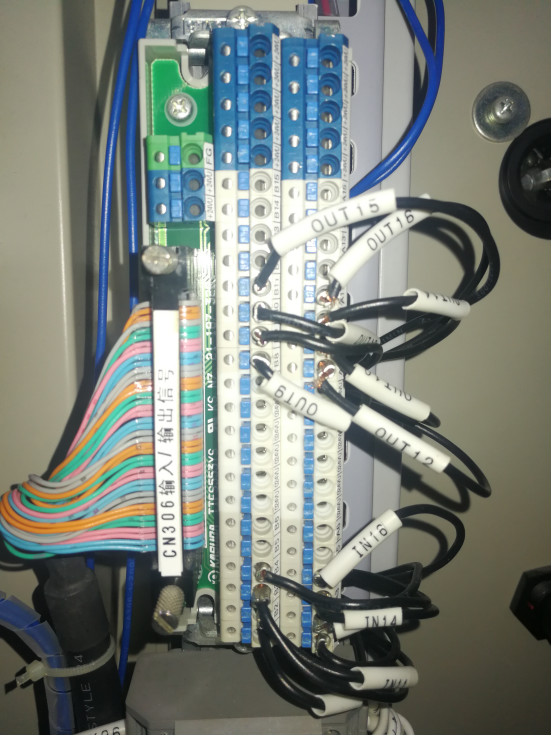
(5)外接端子实物图CN306
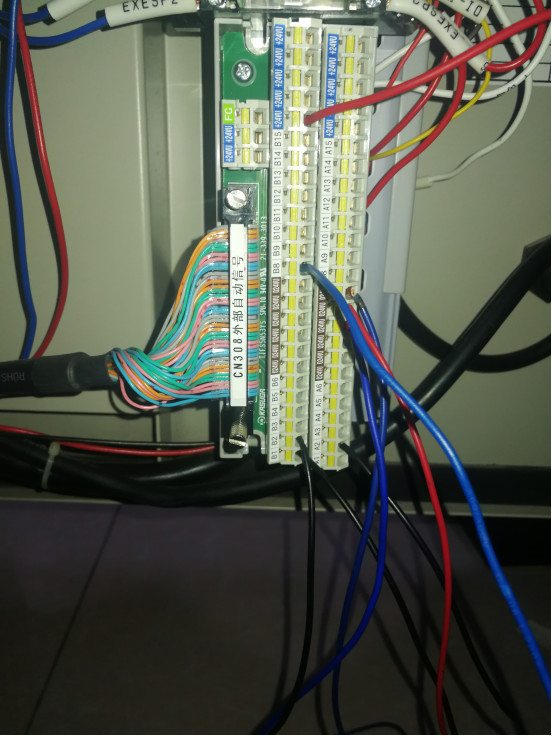
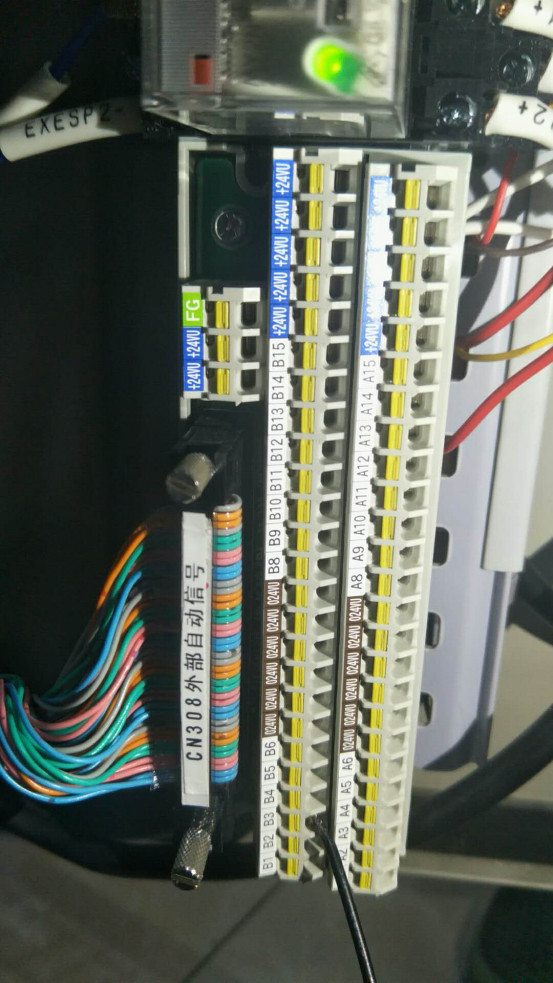
(6)外接端子实物图CN308
2、通用IO基板供电电源
(1)接线板端子
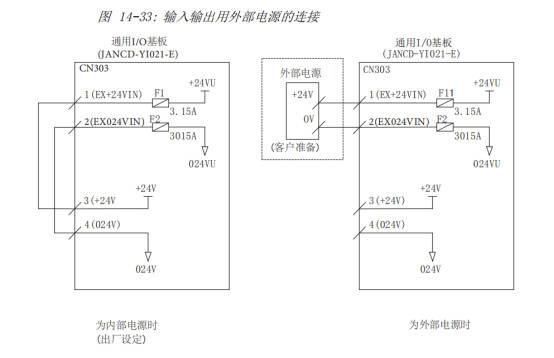
(2)实物接线图:用外接开关电源24V和0V
3、通用IO基板CN306图
(1)CN306接线端子图
(2)CN306实物图
4、通用IO基板CN307
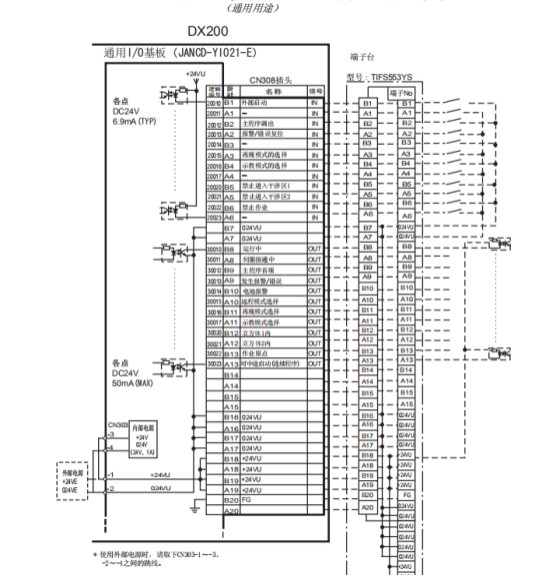
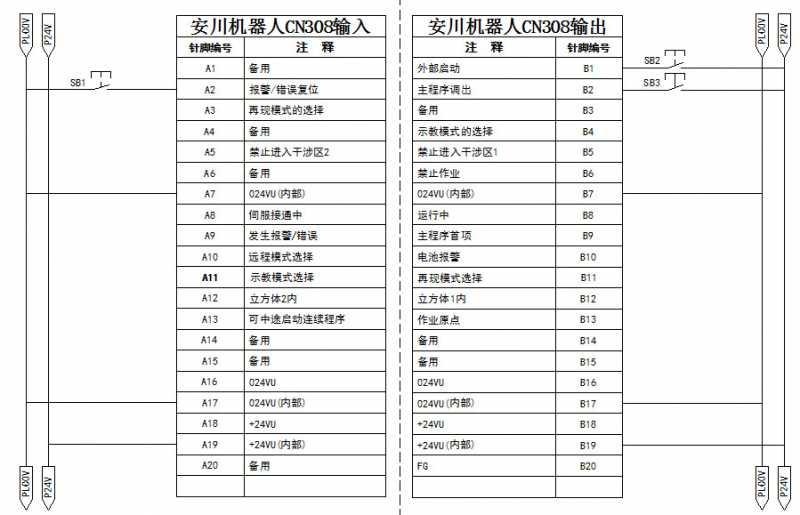
5、通用IO基板CN308
(1)CN308接线端子图
(2)CN308实物图
6、通用IO基板CN309
三、安川外部启动常用的信号及其接线图
1、安全端子台基板常用IO接线图
(1)外部急停接线图
外连接外部操作设备等的急停开关时使用。输入信号,关闭伺服电源,停止程序执行。信号输入时,无法接通伺服电源。由于机器人出厂时配有跳线,使用时必须先取下跳线。不取下跳线,即使输入了外部急停信号也不会起作用,会造成人身伤害或设备损坏。
(2)暂停接线图
连接外部操作设备等的暂停开关时使用。输入信号,停止程序。信号输入时将无法开始作业和进行轴操作。由于机器人出厂时配有跳线,使用时必须先取下跳线。不取下跳线,即使输入了外部急停信号也不会起作用,会造成人身伤害或设备损坏。
(3)外部上电接线图
连接外部操作设备等的伺服开启开关时使用。输入信号,开启伺服电源。
2、通用IO基板CN308专用IO接线图
3、通用IO基板CN306和CN309接线图
四、现场接线和操作步骤
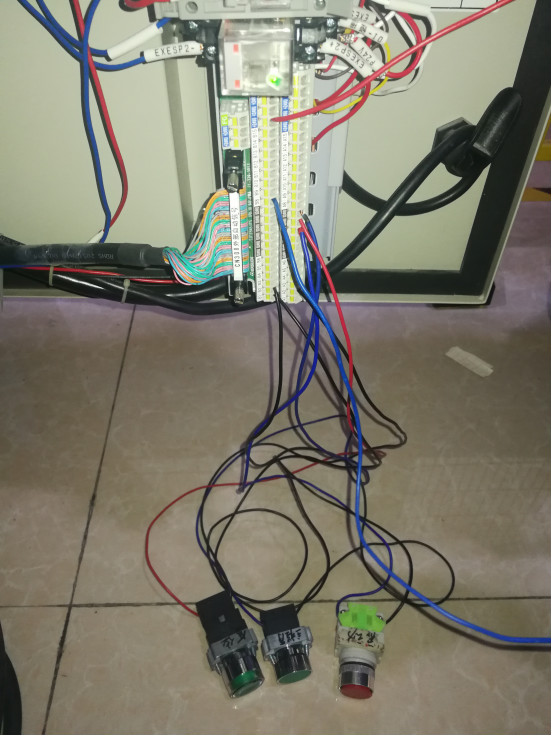
1、端子台实物接线图
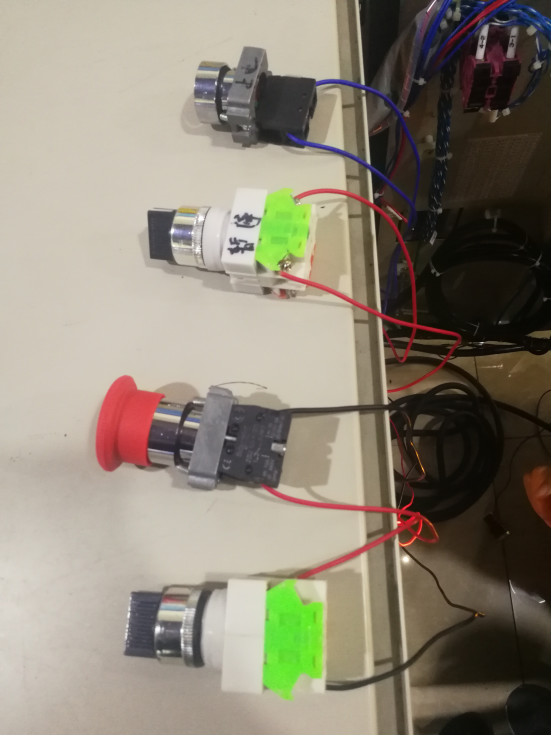
(1)按钮实物接线
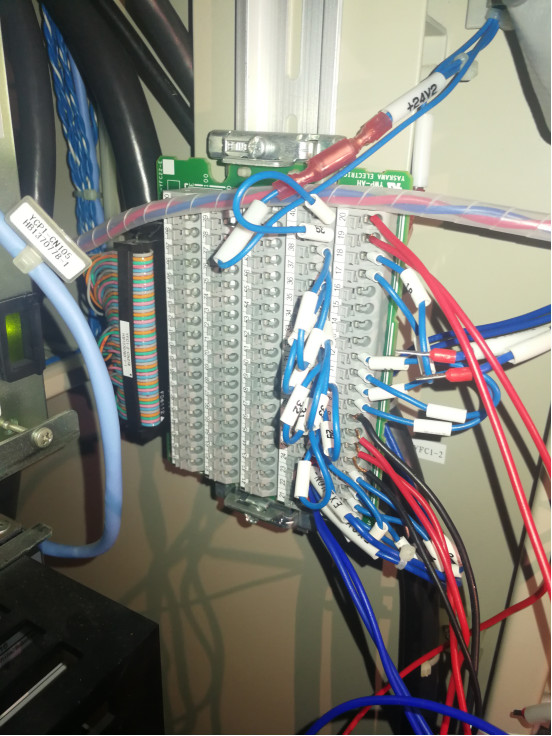
(2)端子台接线实物图
2、CN308专用实物接线图
3、编写程序和设定为主程序
这里使用平移指令SFTON合SFTOF,编写安川平移搬运程序,程序及其注释如下:
NOP 程序开始
*WHILE_T 无限循环标签*WHILE_T
SET B010 0 赋值B010=0
SUB P010 P010 把P010清零
*A 取料放料标签*A
MOVJ C00000 VJ=30.00 取料点上方点位
MOVL C00001 V=300.0 取料点
DOUT OT#(12) ON 机器人夹具信号
TIMER T=0.50 夹具动作延迟0.5秒
MOVL C00002 V=400.0 取料点上方点位
SFTON P010 开启平移指令:这里用机器人坐标系,平移变量以P010为准
MOVJ C00003 VJ=30.00 放料点上方点位
MOVL C00004 V=300.0 放料点位
DOUT OT#(12) OFF 机器人夹具信号
TIMER T=0.50 夹具动作延迟0.5秒
MOVL C00005 V=400.0 取料点上方点位
SFTOF 关闭平移指令
MOVJ C00006 VJ=30.00 取料点上方点位
ADD B010 1 计数器B010自加一
ADD P010 P011 把平移变量P010累加加上P011的偏移量
JUMP *A IF B010<4 如果B010值小于4则执行跳转指令跳转到标签*A,如果B010大于4则继续往下正常运行
WAIT IN#(15)=ON 等待循环启动信号di15
JUMP *WHILE_T 跳转到标签 *WHILE_T无限循环
END 程序结束
4、操作步骤
(1)启动过程
A:安川机器人设置主程序;
B:安川机器人示教器打到外部运行模式
C:按下安全基板伺服上电按钮;
D:按下CN308选择主程序按钮;
E:按下CN308启动按钮——>机器人正常运行
F:每次执行完四个产品,机器人wait di15;
(2)暂停和恢复启动
A:机器人正常运行时,按下暂停按钮,机器人立刻停止,暂停时机器人还处于上电状态;
B:直接按下启动按钮,机器人继续接着往下正常运行;
(3)急停和恢复启动
A:机器人正常运行时,按下安全基板外部急停按钮,机器人立刻停止并报外部急停信息,机器人电机断开;
B:按下CN308报警/错误复位按钮;
C:按下安全基板伺服上电按钮;
D:按下CN308启动信号,机器人接着往下继续正常运行。
5、机器人运行实物图
